
프로그래밍과 문제해결
함수
“결정, 결정, 결정”
부울, 부울 연산자
부울(boolean)은 단지 두값만 갖는 자료형이다: 참과 거짓(True, False). 핵심 연산자 3개가 다음에 나와 있다.
not # 부울 값을 켰다 껐다(토글) 한다.
and # 모든 피연산자가 참이면 참이 된다.
or # 피연산자 중 참이 있다면, 참이 된다.
예를 들어: 시도해 보기
name = "Peter"
age = 10
print("expressions involving name")
a = (name == "Mark")
print( a )
b = (name == "Peter")
print( b )
c = (age == 10)
d = (age == 50)
print( b ) # 거짓: 이름이 Peter면 거짓이다.
print( not b ) # 참: a 의 반대
print("")
print("And operations")
print( a ) # 참: 이름이 Mark면 참이다.
print( a and c ) # 참: 이름이 Mark고, 나이가 10이면 참이다.
print( a and d ) # 거짓: 이름이 Mark로 맞지만, 나이는 50이 아니다.
print("")
print("Or operations")
print( a or c ) # 참: 이름이 Mark라서, 나이에 관계없이 참이다.
print( a or c ) # 참: 나이가 10이라서, 이름에 관계없이 참이다.
print( b or d ) # 거짓: 이름이 Peter가 아니고, 나이도 50이 아니다.
print("")
print("Expression")
value = (a and b) or not(a or c or d)
print( value )이제 부울 표현식을 받아서, 값으로 축약한다:
(a and b) or not(a or c or d) = (True and False) or not(True or True or False)
= (False) or not(True)
= False or False
= False카렐 부울 함수
다음에 카렐이 세상을 감지하고 인식하는데, 사용하는 부울 함수가 나와 있다.
front_is_clear() # 참: 카렐 전방에 벽이 없다면
is_facing_north() # 참: 카렐이 북쪽을 향해 있다면
token_here() # 참: 카렐이 위치한 셀에 적어도 토큰이 하나 있다면
has_token() # 참: 토큰 가방이 비어있지 않다면
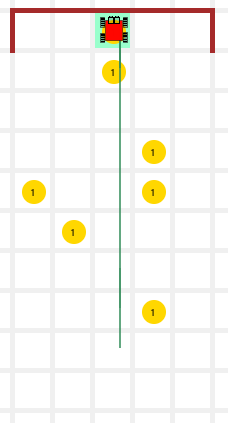
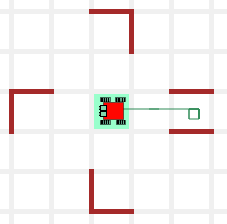
at_goal() # 참: 카렐이 정사각형 집에 있다면상기 함수중 아무것이나 호출하면, 호출된 함수는 부울 값을 반환한다. 예를 들어, 다음 이미지에 나타난 상황은 다음과 같다…
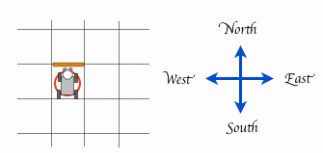
front_is_clear() == False # 거짓: 전방에 장매물이 없다면
is_facing_north() == True # 참: 카렐이 북쪽을 향하고 있다면
token_here() == True # 참: 카렐이 토큰을 가지고 있다면조건문 - if / else

카렐은 결정을 내리는데 감각인지 함수로, if / else 구조를 사용한다. if / else 구조는 다음과 같이 생겼다:
if <조건>: # <조건>이 참이면 -> 'if'문 몸통부문을 실행한다.
명령어 1 # 'if'문 몸통부문 시작
명령어 2
...
명령어 n # 'if'문 몸통부문 끝
else: # <조건> 이 거짓이면 -> 'else'문 몸통부문 시작
명령어 a # 'else'문 몸통부문 시작
명령어 b
...
명령어 z # 'else'문 몸통부문 끝조건이 참 이면, 카렐은 if 문 몸통부문 명령어를 실행한다; 그렇지 않으면, else 문 몸통부문 명령어를 실행한다. 조건 구조에서 else 부분은 선택옵션 사항이다.
상보함수
카렐 감각인지 함수는 제한되어 있어, 자연스럽게 카렐에게 말을 할 수 있도록 허용되지 않는다. 예를 들어, “전방에 장애물이 없지 않다”, not front_is_clear() 라고 말하는 것이 아니라, 대신에 “장방에 벽”, wall_in_front() 이라고 표현한다. 서로 상반되는 함수를 상보함수(complementary function)라고 부른다.

카렐에 내장된 감각인지 함수에 대한 상보함수가 다음에 나와 있다:
# front_is_clear() 상보함수
def wall_in_front():
return not front_is_clear()
# token_here() 상보함수
def cell_is_empty():
return not token_here()
# has_token() 상보함수
def bag_is_empty():
return not has_token()상기 상보함수를 라이브러리에 추가한다.
훈련 작업임무
TM1. 남가주(SoCal) 생활 - 길 닦기
6칸 떨어진 카렐 집에 가는 길에 타일이 일부 빠져있다. 카렐은 가방에 일부 타일을 보유하고 있지만, 얼마나 많은 타일을 보유하고 있는지 모른다. 카렐이 가능하면 많은 타일을 교체하고, 집으로 되돌아 갈 수 있게 하고, 작업한 것을 살펴볼 수 있도록 남쪽을 향하게 하고, 마지막으로 집에 도착했다는 선언한다.
 Corn maze at the Bishop’s Pumpkin Patch in Wheatland, CA
Corn maze at the Bishop’s Pumpkin Patch in Wheatland, CA
해답: 보여주기
초기 설정으로 각 셀에 토큰 숫자는 0 혹은 1 값이 된다. 즉, 일부 셀은 토큰이 있고, 일부 셀은 토큰이 없다. Play 버튼을 누를 때, 값이 발현된다.
정사각형 집에는 한쪽에 작은 검은색 점이 있다. 다음 그림에 나와 있는 것처럼, 로봇이 작업임무를 마치고 검은 점이 있는 방향을 향하고 있음을 나타낸다.
| 출발전 … | … 종료후 |
|---|---|
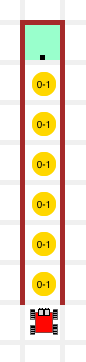 |
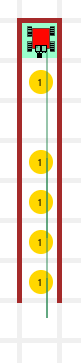 |
힌트:
이번 작업임무에서, 매우 유용한 safe_put() 함수를 사용한다:
def safe_put():
if has_token():
put()put() 대신에 safe_put() 함수를 호출하면 로봇이 절대로 빈 가방에서 토큰을 내려놓지 못하게 보장한다. 지금부터 라이브러리에서 해당 함수를 사용할 수 있다.
TM2. 남가주(SoCal) 생활 - 또다른 터치다운

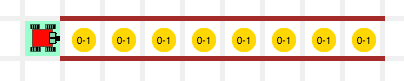
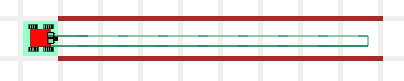
하루 훈련이 거의 끝났다. 카렐은 한번더 터치다운을 시도하고 나서, 샤워실하러 가려한다. 하지만, 동료가 공을 여기저기에 공을 남겨두고 떠났다.
카렐은 10 칸이상 떨어지 있지 않은 엔드존 쪽으로 곧바로 뛰어가야 한다. 경로에 공이 있으면, 공을 집어 들고 뛰어 득점한다. 물론, 경로에 공이 1개 이상 있다면, 단지 공을 1개만 집어들고, 나머지는 무시해야 된다. 카렐로 하여금 곧바로 뛰어가면서 공을 찾았는지, 득점을 했는지 못했는지 목적지에서 선언해야 된다.
해답: 보여주기
초기 설정으로, 각 셀에 토큰 숫자는 0 혹은 1 값이 된다. 즉, 일부 셀은 토큰이 있고, 일부 셀은 토큰이 없다. Play 버튼을 누를 때, 값이 발현된다.
희미한 로봇 3대는 가능한 처음 로봇 위치를 나타낸다. Play 버튼을 누를 때, 프로그램이 시작 위치를 자동 정한다.
| 출발전 … | … 종료후 |
|---|---|
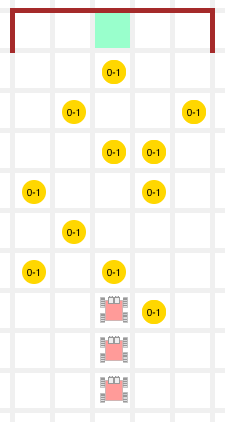 |
 |
힌트:
이번 작업임무에서, 매우 유용한 safe_take() 와 safe_move() 함수를 사용한다:
def safe_take():
if token_here():
take()
def safe_move():
if front_is_clear():
move()상기 함수가 카렐이 벽과 충돌하지 않게 하고, 빈 셀에서 토큰을 집어 올리지 않도록 보장한다. 이 함수를 지금부터 라이브러리에서 사용할 수 있다.
3학년 - 딸기 - 후식
8셀 카렐 정원에는 만개한 빨기가 각 셀마다 0 혹은 1개씩 있다. 카렐로 하여금 정원에 가서 가능하면 많은 딸기를 모으게 하고 나서, 집에 돌아와서, 마지막으로 정원을 바라보게 한다.

초기 설정에 정원 각 셀마다 딸기가 0 혹은 1개씩 갖을 수 있다. Play 버튼을 실행하면, 파이썬이 자동으로 각 셀에 0 혹은 1 값을 고른다. 그러면 시나리오에 맞게 작업임무를 실행한다.
그림에 나온 경우에, 2번, 3번, 8번 셀만 딸기가 1개 있다; 다른 모든 셀에는 딸기가 0개 있다.
해답: 보여주기
| 가능범위를 보여주는 초기설정 | 착수 준비 | 가능한 결과: “아주 맛있어요…!” |
|---|---|---|
 |
 |
 |
4학년 - 올림픽 신화 - 바이애슬론 1
 출처: “Biathlon-Weltcup 2006 Antholz 1” by Götz A. Primke from Muenchen, Germany – Biathlon_WC_Antholz_2006_01_Film3_MassenDamen_13. Licensed under Creative Commons Attribution-Share Alike 2.0 via Wikimedia Commons
출처: “Biathlon-Weltcup 2006 Antholz 1” by Götz A. Primke from Muenchen, Germany – Biathlon_WC_Antholz_2006_01_Film3_MassenDamen_13. Licensed under Creative Commons Attribution-Share Alike 2.0 via Wikimedia Commons
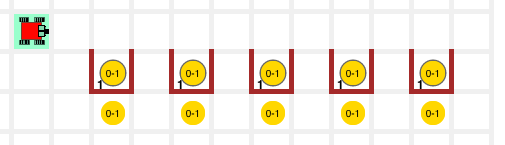
팀으로 모두가 할 수 있다면 어떤 방식으로든지 도와야 한다. 오늘 카렐은 바이애슬론 선수를 자원봉사한다. 선수들이 사격장에 지쳐 도착했지만, 아드레날린은 충만해서, 공에 들어 있는 목표물 5개를 쏴야만 한다. 카렐의 임무는 눕혀진 목표물을 교체하고, 바닥에 떨어진 목표물을 모아오는 것이다.
카렐은 가방에 목표물을 5개 가지고 작업임무를 시작한다. 물론, 어떤 목표물을 교체할지, 어떤 목표물이 눕혀졌는지 알 수가 없다. 그래서, 프로그램을 작성해서 어떤 연습결과든지 처리할 수 있게 만든다. 작업을 완료한 후에, 카렐은 정사각형 집에 되돌아 와야하고, 다음 선수가 사격하길 준비한다.
해답: 보여주기
| 출발전… | 종료후 … |
|---|---|
 |
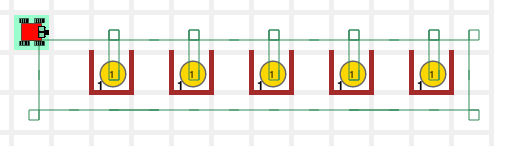 |
힌트:
라이브러리에서 safe_take() 함수를 사용한다.
5학년: 남가주(SoCal) 생활 - 우주 발사대

카렐은 우주비행사가 되는 꿈을 계속 꾸고 있다. 오늘 발사 기술을 훈련한다. 로켓 발사를 준비하려면, 균형있게 하중을 맞춰야 한다. 즉, 각 객실마다 토큰이 하나씩 있어서 로켓 양쪽에 동일한 중량이 나가도록 균형 잡는다. 그리고 나서, 조종실로 가서, “발사!” 메시지로 모든 준비가 완료되었음을 알린다. 카렐은 가방에 토큰 16개로 작업임무를 착수한다.
| 출발전… | 종료후 … |
|---|---|
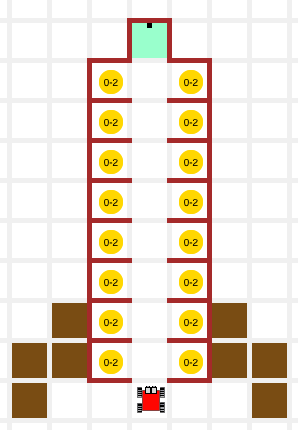 |
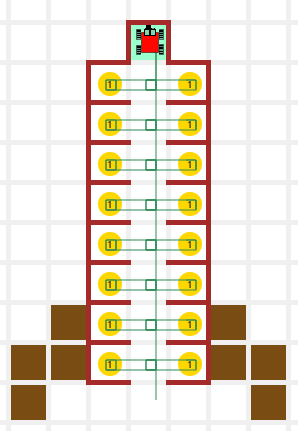 |
해답: 보여주기
6학년: 남가주(SoCal) 생활 - 우주 착륙장

카렐은 우주비행사가 되는 꿈을 계속 꾸고 있다. 성공적인 우주발사 작전임무를 완수한 후에, 이제 우주로켓을 착륙시킬 수 있음을 보여야만 된다. 가능한 4개 우주착륙장에 임의 방향을 향해 착륙한다. 사전에 인지하고 있는 벽이 배열된 정보를 활용해서, 정사각형 집에 대해서, 카렐이 어느 위치에 있는 파악해야 하고, 집으로 이동해야 된다.
| 출발전… | 종료후 … |
|---|---|
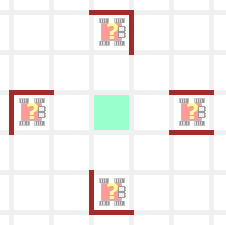 |
 |
해답: 보여주기
힌트:
감각인지 함수를 사용한다. is_facing_north() 함수는 카렐이 북쪽을 향하게 한다. 그리고 나서, 벽 배치정보를 활용해서 카렐이 위치한 우주착륙장을 식별한다.
바이애슬론(Biathon) - 사격과 크로스컨트리 스키를 혼합한 경기↩